













RECENT STORIES

12 Unforgettable Female Characters From Movies and Television
TV shows and movies are filled with unexceptional or depthless female characters. Many on-screen women are able to stir something amazing in us. Daring, unapologetic, and intellectual female characters inspire and delight in many ways. Whether they are the leading role or steal the spotlight from their male…

The Best Plot Twists In Gaming History
The best video games feature incredible stories that rival the best from movies and television. These narratives are able to keep players hooked for…
12 Movies Featuring Protagonists That Are Awful People
You’re supposed to root for a movie’s protagonist. They’re one of the main characters and are generally written as likable. Sometimes, however, that’s hard…

TV Shows That Bombed After An Incredible First Season
A show’s first season is sometimes the best it gets. Whether it’s the show trying to prove itself to audiences or a failure to…

Top 15 Ways to Motivate Yourself to Get Healthy
Does it feel hopeless to start and stick to a fitness routine? Are you just not motivated to take the first step toward a…
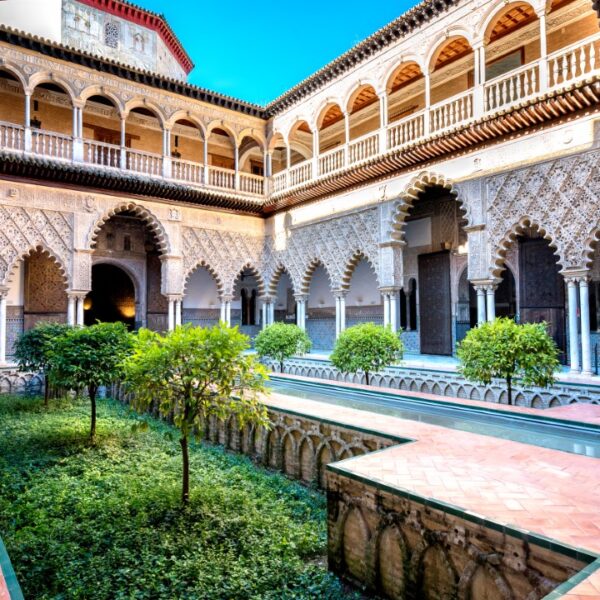
15 Beautiful Travel Destinations That Won’t Break the Bank
Traveling is my favorite thing to do. I just can’t get enough of exploring new places and experiencing different cultures. There are a few…

15 Countries an American Can Move to and Save Money
America’s cost of living is high. Let’s just get that out of the way. This country ranks 12th for the highest cost of living…
15 TV Interviews That Went Downhill Fast
Let’s be honest; most celebrity interviews are full of hot air, false platitudes, and boring small talk. The worst ones are when the celebrity…